ERF_AdvanceGeneralAD.cpp File Reference
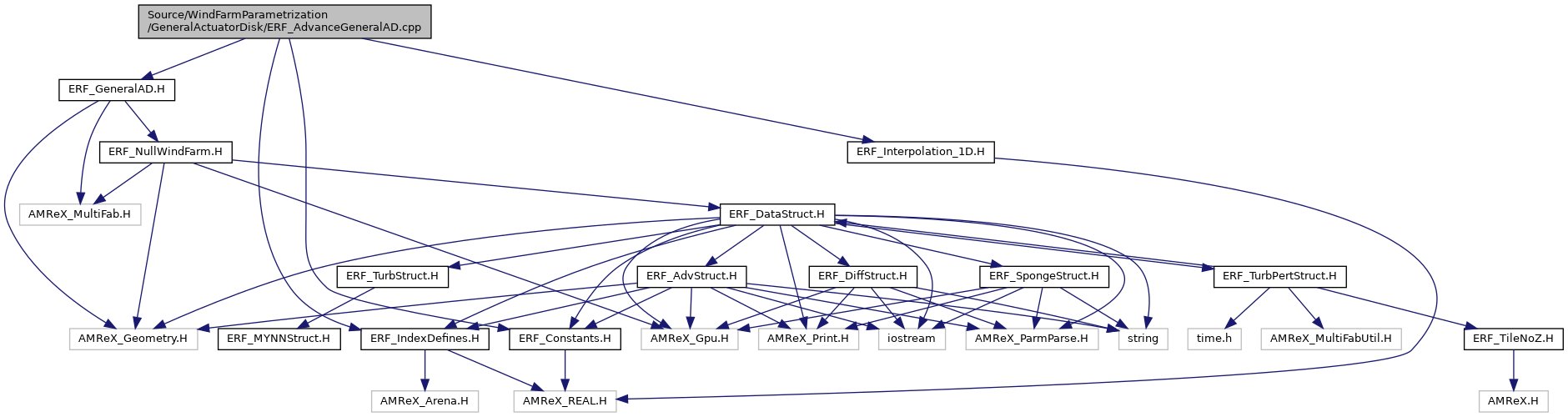
#include <ERF_GeneralAD.H>#include <ERF_IndexDefines.H>#include <ERF_Interpolation_1D.H>#include <ERF_Constants.H>
Include dependency graph for ERF_AdvanceGeneralAD.cpp:
Functions | |
| AMREX_FORCE_INLINE AMREX_GPU_DEVICE int | find_rad_loc_index (const Real rad, const Real *bld_rad_loc, const int n_bld_sections) |
| AMREX_FORCE_INLINE AMREX_GPU_DEVICE std::array< Real, 2 > | compute_source_terms_Fn_Ft (const Real rad, const Real avg_vel, const Real *bld_rad_loc, const Real *bld_twist, const Real *bld_chord, int n_bld_sections, const Real *bld_airfoil_aoa, const Real *bld_airfoil_Cl, const Real *bld_airfoil_Cd, const int n_pts_airfoil, const Real *velocity, const Real *rotor_RPM, const Real *blade_pitch, const int n_spec_extra) |
Function Documentation
◆ compute_source_terms_Fn_Ft()
| AMREX_FORCE_INLINE AMREX_GPU_DEVICE std::array<Real,2> compute_source_terms_Fn_Ft | ( | const Real | rad, |
| const Real | avg_vel, | ||
| const Real * | bld_rad_loc, | ||
| const Real * | bld_twist, | ||
| const Real * | bld_chord, | ||
| int | n_bld_sections, | ||
| const Real * | bld_airfoil_aoa, | ||
| const Real * | bld_airfoil_Cl, | ||
| const Real * | bld_airfoil_Cd, | ||
| const int | n_pts_airfoil, | ||
| const Real * | velocity, | ||
| const Real * | rotor_RPM, | ||
| const Real * | blade_pitch, | ||
| const int | n_spec_extra | ||
| ) |
293 Abort("The iteration procedure for the generalized actuator disk did not converge. Exiting...");
background fields should have been initialized with erf init_type<< std::endl;} Real qt_init=amrex::Real(0.02);pp_prob.query("qt_init", qt_init);Real eq_pot_temp=amrex::Real(320.0);pp_prob.query("eq_pot_temp", eq_pot_temp);bool use_empirical=false;pp_prob.query("use_empircal_psat", use_empirical);if(do_moist_bubble) { Vector< Real > h_r(khi+2);Vector< Real > h_p(khi+2);Vector< Real > h_t(khi+2);Vector< Real > h_q_v(khi+2);Gpu::DeviceVector< Real > d_r(khi+2);Gpu::DeviceVector< Real > d_p(khi+2);Gpu::DeviceVector< Real > d_t(khi+2);Gpu::DeviceVector< Real > d_q_v(khi+2);HSEutils::init_isentropic_hse_no_terrain(h_t.data(), h_r.data(), h_p.data(), h_q_v.data(), dz, khi, qt_init, eq_pot_temp, use_empirical, false);Gpu::copyAsync(Gpu::hostToDevice, h_r.begin(), h_r.end(), d_r.begin());Gpu::copyAsync(Gpu::hostToDevice, h_p.begin(), h_p.end(), d_p.begin());Gpu::copyAsync(Gpu::hostToDevice, h_t.begin(), h_t.end(), d_t.begin());Gpu::copyAsync(Gpu::hostToDevice, h_q_v.begin(), h_q_v.end(), d_q_v.begin());Real *theta_back=d_t.data();Real *p_back=d_p.data();Real *q_v_back=d_q_v.data();int moisture_type=1;if(sc.moisture_type==MoistureType::SAM) { moisture_type=1;} else if(sc.moisture_type==MoistureType::SAM_NoIce||sc.moisture_type==MoistureType::SAM_NoPrecip_NoIce) { moisture_type=2;} ParallelFor(bx,[=, zero_d=zero, one_d=one, tbgmin_d=tbgmin, a_bg_d=a_bg] AMREX_GPU_DEVICE(int i, int j, int k) { const auto prob_lo=geomdata.ProbLo();const auto dx=geomdata.CellSize();const Real x=prob_lo[0]+(i+myhalf) *dx[0];const Real y=prob_lo[1]+(j+myhalf) *dx[1];const Real z=prob_lo[2]+(k+myhalf) *dx[2];Real rad, delta_theta, theta_total, rho, RH;rad=zero_d;if(x_r > rad
Definition: ERF_InitCustomPert_Bubble.H:94
AMREX_ALWAYS_ASSERT(bx.length()[2]==khi+1)
AMREX_GPU_HOST_DEVICE AMREX_FORCE_INLINE amrex::Real interpolate_1d(const amrex::Real *alpha, const amrex::Real *beta, const amrex::Real alpha_interp, const int alpha_size)
Definition: ERF_Interpolation_1D.H:14
Referenced by GeneralAD::source_terms_cellcentered().
Here is the call graph for this function:

Here is the caller graph for this function:

◆ find_rad_loc_index()
| AMREX_FORCE_INLINE AMREX_GPU_DEVICE int find_rad_loc_index | ( | const Real | rad, |
| const Real * | bld_rad_loc, | ||
| const int | n_bld_sections | ||
| ) |
