#include <ERF_EBPolygon.H>
Public Member Functions | |
| AMREX_GPU_HOST_DEVICE | polygon_ (amrex::RealVect a_point, amrex::RealVect a_normal) |
| AMREX_GPU_HOST_DEVICE | polygon_ () |
| AMREX_GPU_HOST_DEVICE void | add_vertex (amrex::RealVect const &a_v) |
| AMREX_GPU_HOST_DEVICE int | get_num_vertices () |
| AMREX_GPU_HOST_DEVICE AMREX_FORCE_INLINE void | set_area (amrex::Real const &a_area) |
| AMREX_GPU_HOST_DEVICE AMREX_FORCE_INLINE void | define () |
| AMREX_GPU_HOST_DEVICE AMREX_FORCE_INLINE int | ok () const noexcept |
| AMREX_GPU_HOST_DEVICE AMREX_FORCE_INLINE amrex::Real | area () const noexcept |
| AMREX_GPU_HOST_DEVICE AMREX_FORCE_INLINE amrex::Real | distance (amrex::RealVect const &a_point) const noexcept |
| AMREX_GPU_HOST_DEVICE AMREX_FORCE_INLINE amrex::RealVect | get_centroid () const noexcept |
| AMREX_GPU_HOST_DEVICE AMREX_FORCE_INLINE amrex::RealVect | normal () const noexcept |
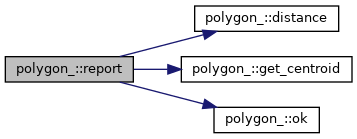
| void | report (int const a_id, amrex::RealVect a_v0) |
| void | debug (int const a_id) |
| void | debug () |
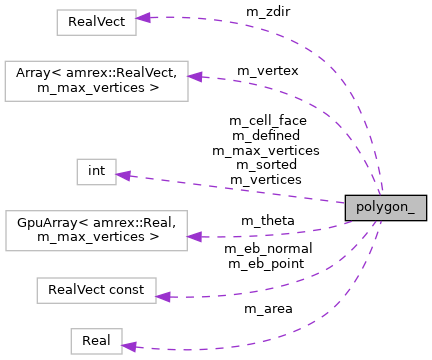
Private Attributes | |
| int const | m_cell_face |
| amrex::RealVect const | m_eb_point |
| amrex::RealVect const | m_eb_normal |
| int | m_defined |
| int | m_num_vertices |
| amrex::Real | m_area |
| int | m_sorted |
| amrex::Array< amrex::RealVect, m_max_vertices > | m_vertices |
| amrex::GpuArray< amrex::Real, m_max_vertices > | m_theta |
| amrex::RealVect | m_zdir |
Static Private Attributes | |
| static constexpr int | m_max_vertices = 6 |
Constructor & Destructor Documentation
◆ polygon_() [1/2]
|
inline |
◆ polygon_() [2/2]
|
inline |
Member Function Documentation
◆ add_vertex()
|
inline |
Referenced by eb_cut_cell_::calc_edge_intersections(), and eb_cut_cell_::set_covered_regular_cell_vertices().

◆ area()
|
inlinenoexcept |
Referenced by eb_cut_cell_::areaBoun(), eb_cut_cell_::centVol(), get_centroid(), and eb_cut_cell_::volume().


◆ debug() [1/2]
|
inline |
◆ debug() [2/2]
|
inline |
◆ define()
|
inline |

◆ distance()
|
inlinenoexcept |
Referenced by report(), and eb_cut_cell_::volume().


◆ get_centroid()
|
inlinenoexcept |
Referenced by eb_cut_cell_::centBoun(), eb_cut_cell_::centVol(), define(), and report().


◆ get_num_vertices()
|
inline |
◆ normal()
|
inlinenoexcept |
◆ ok()
|
inlinenoexcept |

◆ report()
|
inline |
◆ set_area()
|
inline |

Member Data Documentation
◆ m_area
|
private |
Referenced by area(), define(), ok(), report(), and set_area().
◆ m_cell_face
|
private |
Referenced by define().
◆ m_defined
|
private |
Referenced by define(), distance(), and ok().
◆ m_eb_normal
|
private |
Referenced by define().
◆ m_eb_point
|
private |
Referenced by define().
◆ m_max_vertices
|
staticconstexprprivate |
Referenced by add_vertex().
◆ m_num_vertices
|
private |
Referenced by add_vertex(), debug(), define(), get_centroid(), get_num_vertices(), and report().
◆ m_sorted
|
private |
Referenced by define().
◆ m_theta
|
private |
Referenced by define().
◆ m_vertices
|
private |
Referenced by add_vertex(), debug(), define(), distance(), get_centroid(), and report().
◆ m_zdir
|
private |
Referenced by define(), distance(), and normal().
The documentation for this class was generated from the following file:
- Source/EB/ERF_EBPolygon.H