#include <ERF_InputSoundingData.H>
Public Member Functions | |
| InputSoundingData () | |
| void | resize_arrays () |
| void | read_from_file (const amrex::Geometry &geom, const amrex::Vector< amrex::Real > &zlevels_stag, int itime, bool is_moist) |
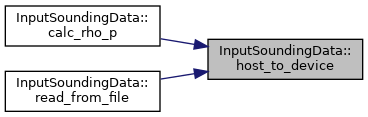
| void | calc_rho_p (int itime) |
| void | calc_rho_p_isentropic (int itime) |
| void | host_to_device (int itime) |
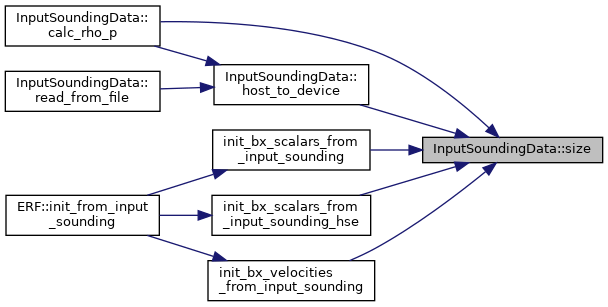
| int | size (int itime) const |
Public Attributes | |
| int | ntimes |
| amrex::Real | tau_nudging = amrex::Real(5.0) |
| amrex::Vector< std::string > | input_sounding_file = {} |
| amrex::Vector< amrex::Real > | input_sounding_time = {} |
| int | n_sounding_files = 0 |
| int | n_sounding_times = 0 |
| bool | assume_dry {false} |
| amrex::Real | press_ref_inp_sound |
| amrex::Real | theta_ref_inp_sound |
| amrex::Real | qv_ref_inp_sound |
| amrex::Vector< amrex::Vector< amrex::Real > > | z_inp_sound |
| amrex::Vector< amrex::Vector< amrex::Real > > | theta_inp_sound |
| amrex::Vector< amrex::Vector< amrex::Real > > | qv_inp_sound |
| amrex::Vector< amrex::Vector< amrex::Real > > | U_inp_sound |
| amrex::Vector< amrex::Vector< amrex::Real > > | V_inp_sound |
| amrex::Vector< amrex::Gpu::DeviceVector< amrex::Real > > | z_inp_sound_d |
| amrex::Vector< amrex::Gpu::DeviceVector< amrex::Real > > | theta_inp_sound_d |
| amrex::Vector< amrex::Gpu::DeviceVector< amrex::Real > > | qv_inp_sound_d |
| amrex::Vector< amrex::Gpu::DeviceVector< amrex::Real > > | U_inp_sound_d |
| amrex::Vector< amrex::Gpu::DeviceVector< amrex::Real > > | V_inp_sound_d |
| amrex::Vector< amrex::Real > | pm_integ |
| amrex::Vector< amrex::Real > | rhod_integ |
| amrex::Gpu::DeviceVector< amrex::Real > | p_inp_sound_d |
| amrex::Gpu::DeviceVector< amrex::Real > | rho_inp_sound_d |
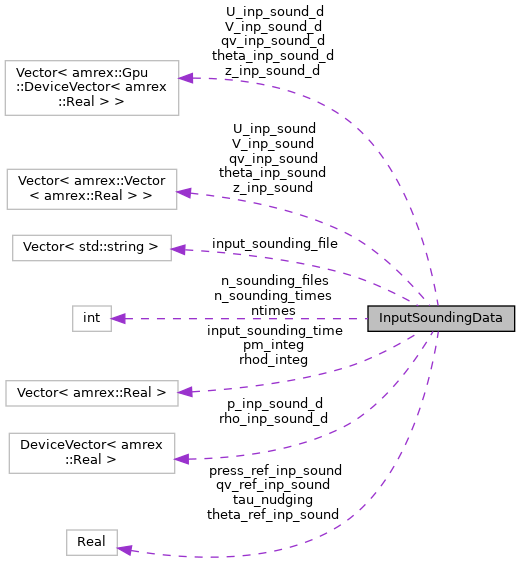
Detailed Description
Data structure storing input sounding data. Also handles reading the input file for sounding data and hydrostatic column integration.
Constructor & Destructor Documentation
◆ InputSoundingData()
|
inline |
Member Function Documentation
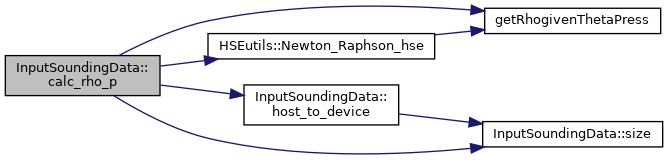
◆ calc_rho_p()
|
inline |
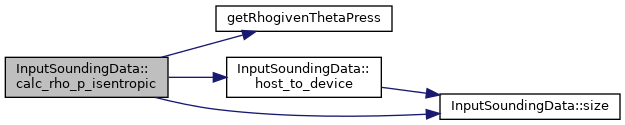
◆ calc_rho_p_isentropic()
|
inline |
◆ host_to_device()
|
inline |
Referenced by calc_rho_p(), calc_rho_p_isentropic(), and read_from_file().

◆ read_from_file()
|
inline |

◆ resize_arrays()
|
inline |
◆ size()
|
inline |
Referenced by calc_rho_p(), calc_rho_p_isentropic(), host_to_device(), init_state_from_input_sounding(), init_state_from_input_sounding_hse(), and init_velocities_from_input_sounding().

Member Data Documentation
◆ assume_dry
| bool InputSoundingData::assume_dry {false} |
Referenced by calc_rho_p_isentropic(), and init_state_from_input_sounding_hse().
◆ input_sounding_file
| amrex::Vector<std::string> InputSoundingData::input_sounding_file = {} |
Referenced by InputSoundingData(), and read_from_file().
◆ input_sounding_time
| amrex::Vector<amrex::Real> InputSoundingData::input_sounding_time = {} |
Referenced by InputSoundingData(), make_mom_sources(), and make_sources().
◆ n_sounding_files
| int InputSoundingData::n_sounding_files = 0 |
Referenced by InputSoundingData(), and resize_arrays().
◆ n_sounding_times
| int InputSoundingData::n_sounding_times = 0 |
Referenced by InputSoundingData().
◆ ntimes
| int InputSoundingData::ntimes |
Referenced by resize_arrays().
◆ p_inp_sound_d
| amrex::Gpu::DeviceVector<amrex::Real> InputSoundingData::p_inp_sound_d |
Referenced by host_to_device().
◆ pm_integ
| amrex::Vector<amrex::Real> InputSoundingData::pm_integ |
Referenced by calc_rho_p(), calc_rho_p_isentropic(), and host_to_device().
◆ press_ref_inp_sound
| amrex::Real InputSoundingData::press_ref_inp_sound |
Referenced by calc_rho_p(), calc_rho_p_isentropic(), and read_from_file().
◆ qv_inp_sound
| amrex::Vector<amrex::Vector<amrex::Real> > InputSoundingData::qv_inp_sound |
Referenced by calc_rho_p(), calc_rho_p_isentropic(), host_to_device(), read_from_file(), resize_arrays(), and size().
◆ qv_inp_sound_d
| amrex::Vector<amrex::Gpu::DeviceVector<amrex::Real> > InputSoundingData::qv_inp_sound_d |
Referenced by host_to_device(), init_state_from_input_sounding(), init_state_from_input_sounding_hse(), and resize_arrays().
◆ qv_ref_inp_sound
| amrex::Real InputSoundingData::qv_ref_inp_sound |
Referenced by calc_rho_p(), calc_rho_p_isentropic(), and read_from_file().
◆ rho_inp_sound_d
| amrex::Gpu::DeviceVector<amrex::Real> InputSoundingData::rho_inp_sound_d |
Referenced by host_to_device(), and init_state_from_input_sounding_hse().
◆ rhod_integ
| amrex::Vector<amrex::Real> InputSoundingData::rhod_integ |
Referenced by calc_rho_p(), calc_rho_p_isentropic(), and host_to_device().
◆ tau_nudging
| amrex::Real InputSoundingData::tau_nudging = amrex::Real(5.0) |
Referenced by InputSoundingData(), make_mom_sources(), and make_sources().
◆ theta_inp_sound
| amrex::Vector<amrex::Vector<amrex::Real> > InputSoundingData::theta_inp_sound |
Referenced by calc_rho_p(), calc_rho_p_isentropic(), host_to_device(), read_from_file(), resize_arrays(), and size().
◆ theta_inp_sound_d
| amrex::Vector<amrex::Gpu::DeviceVector<amrex::Real> > InputSoundingData::theta_inp_sound_d |
◆ theta_ref_inp_sound
| amrex::Real InputSoundingData::theta_ref_inp_sound |
Referenced by calc_rho_p(), calc_rho_p_isentropic(), and read_from_file().
◆ U_inp_sound
| amrex::Vector<amrex::Vector<amrex::Real> > InputSoundingData::U_inp_sound |
Referenced by calc_rho_p(), calc_rho_p_isentropic(), host_to_device(), read_from_file(), resize_arrays(), and size().
◆ U_inp_sound_d
| amrex::Vector<amrex::Gpu::DeviceVector<amrex::Real> > InputSoundingData::U_inp_sound_d |
Referenced by host_to_device(), init_velocities_from_input_sounding(), make_mom_sources(), and resize_arrays().
◆ V_inp_sound
| amrex::Vector<amrex::Vector<amrex::Real> > InputSoundingData::V_inp_sound |
Referenced by calc_rho_p(), calc_rho_p_isentropic(), host_to_device(), read_from_file(), resize_arrays(), and size().
◆ V_inp_sound_d
| amrex::Vector<amrex::Gpu::DeviceVector<amrex::Real> > InputSoundingData::V_inp_sound_d |
Referenced by host_to_device(), init_velocities_from_input_sounding(), make_mom_sources(), and resize_arrays().
◆ z_inp_sound
| amrex::Vector<amrex::Vector<amrex::Real> > InputSoundingData::z_inp_sound |
Referenced by calc_rho_p(), calc_rho_p_isentropic(), host_to_device(), read_from_file(), resize_arrays(), and size().
◆ z_inp_sound_d
| amrex::Vector<amrex::Gpu::DeviceVector<amrex::Real> > InputSoundingData::z_inp_sound_d |
The documentation for this struct was generated from the following file:
- Source/DataStructs/ERF_InputSoundingData.H